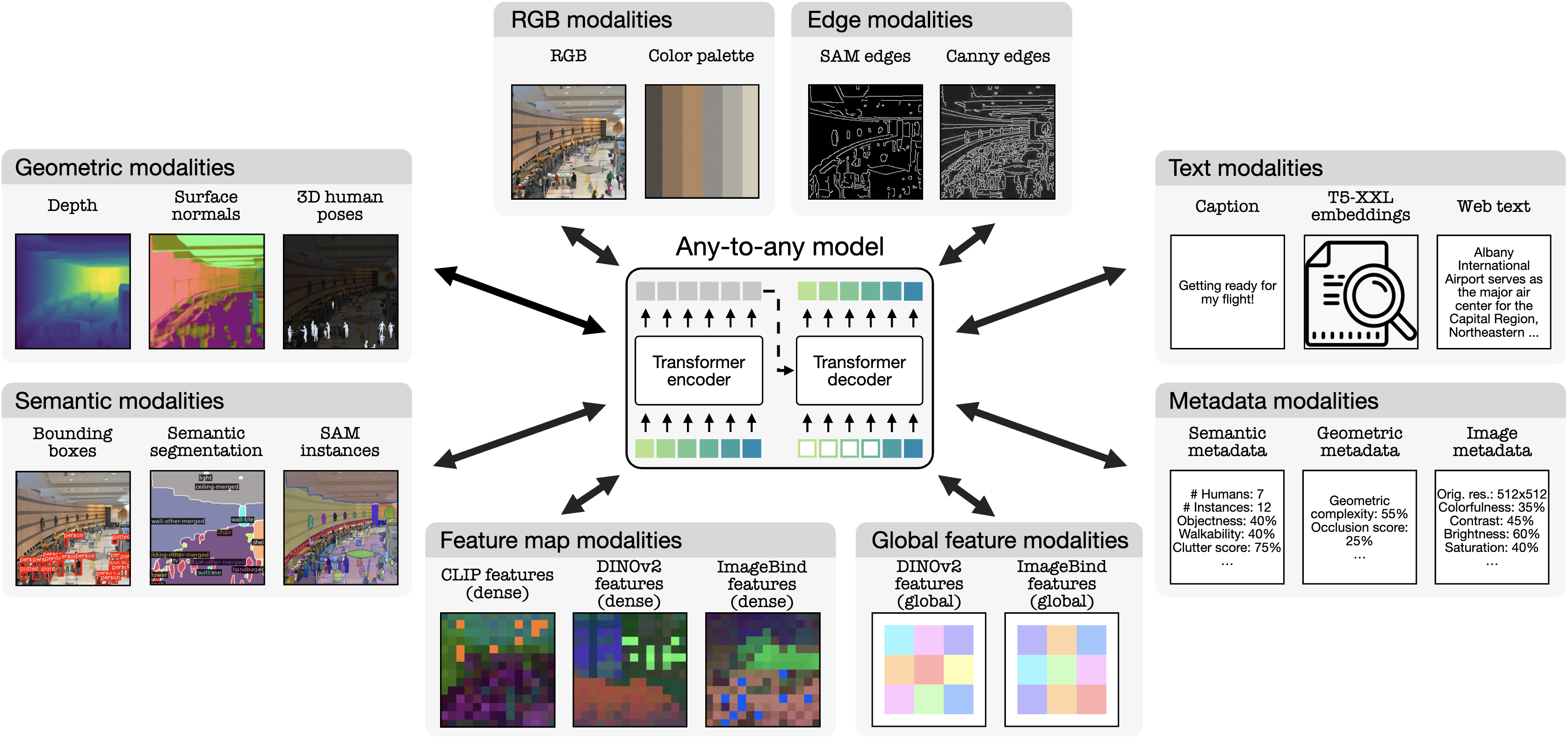
Current multimodal and multitask foundation models like 4M or UnifiedIO show promising results, but in practice their out-of-the-box abilities to accept diverse inputs and perform diverse tasks are limited by the (usually rather small) number of modalities and tasks they are trained on. In this paper, we expand upon the capabilities of them by training a single model on tens of highly diverse modalities and by performing co-training on large-scale multimodal datasets and text corpora. This includes training on several semantic and geometric modalities, feature maps from recent state of the art models like DINOv2 and ImageBind, pseudo labels of specialist models like SAM and 4DHumans, and a range of new modalities that allow for novel ways to interact with the model and steer the generation, for example image metadata or color palettes. A crucial step in this process is performing discrete tokenization on various modalities, whether they are image-like, neural network feature maps, vectors, structured data like instance segmentation or human poses, or data that can be represented as text.
Through this, we expand on the out-of-the-box capabilities of multimodal models and specifically show the possibility of training one model to solve at least 3x more tasks/modalities than existing ones and doing so without a loss in performance. This enables more fine-grained and controllable multimodal generation capabilities and allows us to study the distillation of models trained on diverse data and objectives into a unified model. We successfully scale the training to a three billion parameter model using tens of modalities and different datasets.
Please see our GitHub repository for code and pre-trained models and our website for interactive visualizations!